遠隔ロボティクス制御利用サービスのためのサービス品質及びアーキテクチャの研究
IoT機器やロボティクス機器の制御などを通信ネットワーク経由で行う際のシステム全体のサービス品質を研究しています.これまでサービス品質は人が利用することを前提に検討されてきました.聞いたことがあるのではないかと思いますが,QoS(Quality of Service)というネットワーク上で提供するサービス品質を示すモデルも存在します.このような概念を様々なIoT機器やロボティクス機器,機能に拡大したいと考えています.
ROS(Robot Operating System)-2の活用
ROSはロボット開発するためのツールやライブラリが含まれたオープンソースソフトウェアです.OSという名称ですが、一般的なコンピュータのOSとは違い、様々なOS上で動作するオープンソースのミドルウェア(プラットフォーム)です.ロボットシステムの開発・制御に必要な機能を提供しているため,ROSに対応したロボットを購入すれば,簡単に制御が可能です.
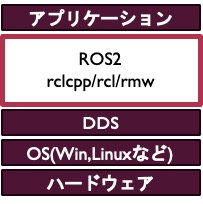 ROSソフトウェアモデル
ROSソフトウェアモデル
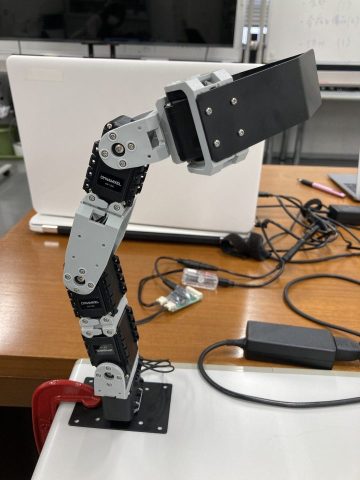 ROS対応のロボットアーム
ROS対応のロボットアーム
ネットワークに関するQoS条件を変化させた実験
ロボティクス機器の機能を仮想化して,ネットワーク内に分散配置することで,ロボティクス機器自体をシンプルにする検討も行っています.そのため,ネットワークを介して機能を制御することを考え,ネットワークの状況がロボットに与える影響を調査しています.写真はネットワークにパケットロスがない場合とある場合のロボットの動作の違いをシミュレーションしています.
パケットロス0%のロボットアーム動作シミュレーション
パケットロス10%のロボットアーム動作シミュレーション
関連論文
[1]末田 欣子, 小池 新, ”画像制御に基づくネットワーク品質の与える影響”, 信学技報, vol. 122, no. 407, IN2022-121, pp. 329-334, 情報ネットワーク研究会(2023.3).
[2]末田 欣子, 小池 新, ”ネットワーク制御型ロボティクスデバイスの映像品質に関する影響について”, 信学技報, vol. 122, no. 275, CQ2022-55, pp. 46-51, コミュニケーションクオリティ研究会(2022.11).
[3]武田 大樹, 末田 欣子 , 小池 新(東京家政大), ”ROS2の画像通信におけるネットワーク品質の影響について”, 電子情報通信学会東京支部学生会研究発表会(2023.3).